OpenCVで二つのWEBカメラを用いたステレオカメラの実装
ステレオカメラは,空間の深度を測定するのに使われます.本稿では,二台のウェブカメラを用いてステレオカメラを実装します.ある程度のロバスト性を確保するため,キャリブレーションも行います.
結果,以下のような深度画像を得ることができた.

ステレオカメラの準備
"LOGICOOL ウェブカム HD画質 120万画素 C270" を二つ用意し,水平になるように並べて固定します.

ダウンロード
今回使用するpythonスクリプトをダウンロードします.
ファイル構成
- OpenCV-StereoCamera
chessboardchessboard_A.pdfchessboard_B.png
libcamera_shutter.pystereo_camera_shutter.pycamera_calibrate.pystereo_camera_calibrate.pystereo.py
本稿では, 主にpythonとopenCVを使用していきます. これらの環境を整えてください.
左右のカメラデバイス番号の把握
二つのカメラを接続します.
camera_shutter.py内の上部にある,CAMERA_DEVISEを0から始まる番号で適宜変えていき, camera_shutter.pyを実行します.
実行画面で表示されるカメラ画像から左右のカメラを把握し,対応するデバイス番号を覚えておきます.
camera_shutter.pyの仕様sキーでカメラ撮影,qキーでプログラム終了.撮影した画像は,imagesフォルダに格納されます.
キャリブレーション
二つのカメラの製品は同じでも,個体差があり,同じ姿勢で同じシーンを撮影しても得られる画像は異なります. そのため,二つのカメラにある差を補正するため,キャリブレーションを行います.
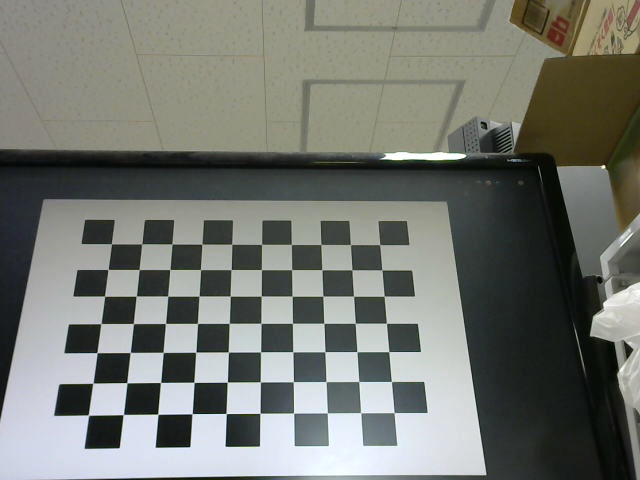
ディスプレイにダウンロードしたチェスボード画像(chessboard_A.pdf)を表示させます.
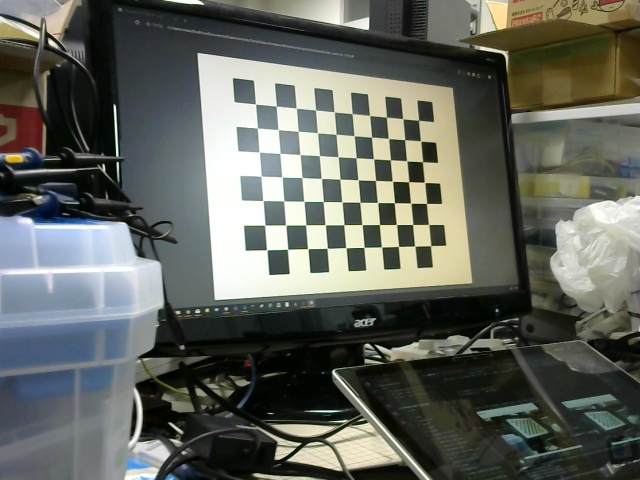
stereo_camera_shutter.pyを実行し,様々な角度でチェスボードの写真を撮ります.撮る角度は,左右,上下,正面,斜めなど様々な角度で撮ります.
撮った写真は,imagesフォルダに蓄積されます.

stereo_camera_calibrate.pyを実行しキャリブレーションを行います.キャリブレーションデータは,ファイル’stereo_calibarate_data.json’に保存されます.
実行
最後に,stereo.pyを実行し,デプス画像を得ます.