デバッガ, ROS, テトリス, DA変換, メモリ, アセンブリ
その他
PHPでWebアプリケーションを作るとき, 必ずデバックを行う必要があります. Debugの方法として, "echo"関数などを使用したプログラムの状態を画面に出力するなどがありますが, ファイルとしてそのようなデバック情報が保存されないのが難点です.
このDebugツールは以下の目的で作られました.
- 簡単にDebugできるように
- 外部ファイルとしてデバック情報を保存

ここには,ROS2に関する情報が書かれます.
豆知識
Pipenv仮想パッケージ環境上でROS2ノードを動かす.
ここでは, 実際にタスクが作成されたときのメモリの構造を示していきたいと思います. メモリでの各領域の説明, この構造によるmallocの問題を示します.
OSはタスクごとにメモリを動的に割り当てる必要があります(タスクが保有するメモリに関することはのちに説明します). というのも, これらのタスクはアプリケーション実行中に生成, 削除される可能性があるからです.
今回では, このメモリ管理をOSが行うことにします. OSがメモリ管理を行うことで, OS動作の理解がしやすくなるからです.
このページでは, OSによるメモリ管理をどのように実装するのか説明します.
タスクの切り替えをする際, その時のCPUの状態を保存する必要があります. このCPUの状態をコンテキストと呼びます. あるタスクから離れるときはコンテキストの保存を行い, あるタスクに復帰するときはコンテキストの復帰を行います.
ここでは, コンテキストに関する詳しい説明とコンテキストの保存と復帰の方法について説明します.
RTOSは, 組み込み系のシステムで用いられることが多いです.
一般OSと同様にタスクの切り替えを行う点は同じですが, タスクの切り替え規則に特色があります[1]. タスクの実行可能状態になるまでの時間の最悪値が保証されるように作られています.
Pipenv仮想パッケージ環境上でROS2ノードを動かす.
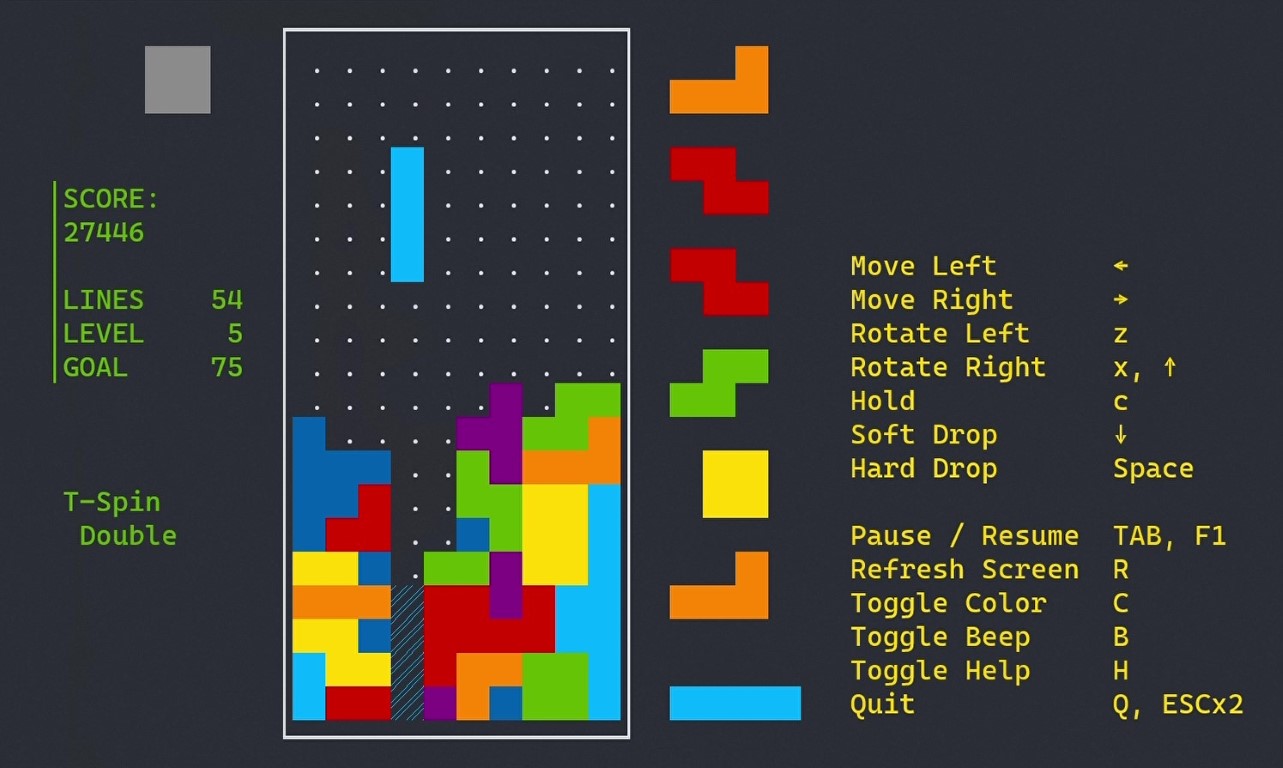
bashでもなく, zshでもなく, cshでもなく, 純粋なshで動く, テトリスの公式ガイドラインにそったテトリスを作りたい.
コントローラ製作に関することについて説明します. 説明の項目は以下のとおりです.
- 部品入手
- 製作
- 説明
- 参考文献
ここでは, 実際にタスクが作成されたときのメモリの構造を示していきたいと思います. メモリでの各領域の説明, この構造によるmallocの問題を示します.
ここでは, 実際にタスクが作成されたときのメモリの構造を示していきたいと思います. メモリでの各領域の説明, この構造によるmallocの問題を示します.
OSはタスクごとにメモリを動的に割り当てる必要があります(タスクが保有するメモリに関することはのちに説明します). というのも, これらのタスクはアプリケーション実行中に生成, 削除される可能性があるからです.
今回では, このメモリ管理をOSが行うことにします. OSがメモリ管理を行うことで, OS動作の理解がしやすくなるからです.
このページでは, OSによるメモリ管理をどのように実装するのか説明します.
OSはタスクごとにメモリを動的に割り当てる必要があります(タスクが保有するメモリに関することはのちに説明します). というのも, これらのタスクはアプリケーション実行中に生成, 削除される可能性があるからです.
今回では, このメモリ管理をOSが行うことにします. OSがメモリ管理を行うことで, OS動作の理解がしやすくなるからです.
このページでは, OSによるメモリ管理をどのように実装するのか説明します.
RTOSは, 組み込み系のシステムで用いられることが多いです.
一般OSと同様にタスクの切り替えを行う点は同じですが, タスクの切り替え規則に特色があります[1]. タスクの実行可能状態になるまでの時間の最悪値が保証されるように作られています.