液晶, C言語, お問い合わせ, ROS
その他
ここでは, グラフィック液晶’SG12864ASLB-GB’の操作方法を説明します. これは, いわゆるライブラリの説明ではなく, ハードウェアそのものに対する操作方法です. この内容から, 自作のライブラリなどを製作することが可能です.
説明項目は以下のとおりです.
- 入手方法
- ピン配置
- 名称
- 実際に使ってみる
- 参考文献
ここでは, C言語に関する詳細を説明します.
タスクを管理するにあたり, 各タスクの情報を保持しておく必要があります. このような情報の塊をタスクコントロールブロック(TCB)と呼びます.
C言語には, マクロと呼ばれるものがあります. マクロとは, コンパイル前にある規則に従って文字を置き換える機能を持ちます[1].
ここでは, マクロの詳しい機能の説明を行います.
当サイトの目的など.
このサイトに関して何かありましたら, 下の問い合わせフォームよりお知らせください.
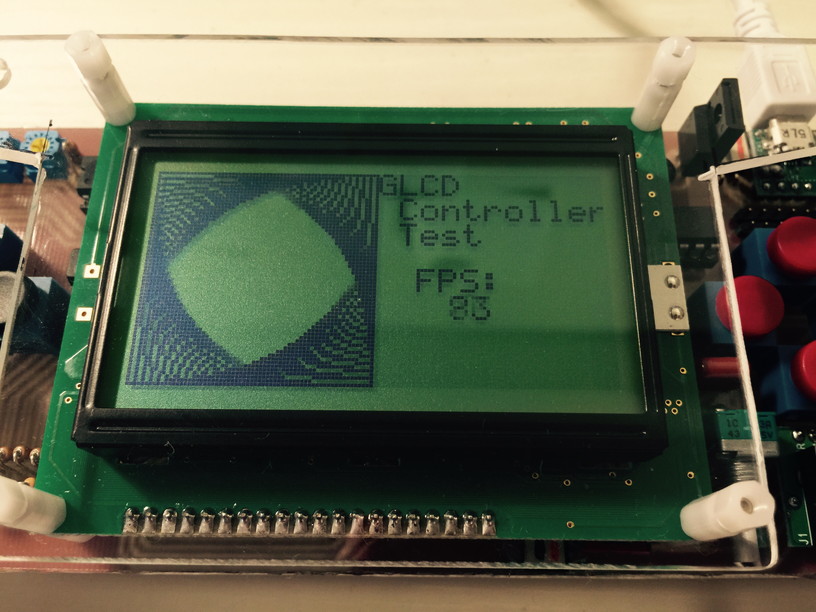
GLCDControllerとは、グラフィック液晶SG12864ASLB-GBを操作するものです. GLCDControllerの特徴は以下の通りです.
- 2Dグラフィック操作ライブラリCanvasの利点を受け継ぎ
- 高いフレームレート
このGLCDControllerのメンバ変数としてCanvasがあるのですが, このCanvasが2Dグラフィック操作を簡単にします. Canvasについての特徴はCanvasの特徴を参照してください.
画面の更新速度ですが,最高60fps以上(最高fps85fps, 平均60fps, 全画面更新15fps)まで出せます(ArduinoUno 16Mhzで検証).
GLCDControllerを改良、強化、何でもしてください(;´∀`)
グラフィック液晶に関する情報をあつかいます. 扱うグラフィック液晶は’SG12864ASLB-GB’です.
RTOSは, 組み込み系のシステムで用いられることが多いです.
一般OSと同様にタスクの切り替えを行う点は同じですが, タスクの切り替え規則に特色があります[1]. タスクの実行可能状態になるまでの時間の最悪値が保証されるように作られています.
OSがタスクの切り替えを行うためには, 定期的にOSが現在実行中のタスクの処理を中断してタスク切り替え処理を行う必要があります.
ここでは, このようなOSが定期的に割り込み処理を行う方法を説明します. また, 割り込み時の処理について説明します.
PortMacro.hで宣言されているOSコア部分の関数をここで定義します. このファイルはAVRマイコン専用です.
OSはタスクごとにメモリを動的に割り当てる必要があります(タスクが保有するメモリに関することはのちに説明します). というのも, これらのタスクはアプリケーション実行中に生成, 削除される可能性があるからです.
今回では, このメモリ管理をOSが行うことにします. OSがメモリ管理を行うことで, OS動作の理解がしやすくなるからです.
このページでは, OSによるメモリ管理をどのように実装するのか説明します.
ここでは, 実際にタスクが作成されたときのメモリの構造を示していきたいと思います. メモリでの各領域の説明, この構造によるmallocの問題を示します.
豆知識

ここには,ROS2に関する情報が書かれます.
Pipenv仮想パッケージ環境上でROS2ノードを動かす.
RTOSは, 組み込み系のシステムで用いられることが多いです.
一般OSと同様にタスクの切り替えを行う点は同じですが, タスクの切り替え規則に特色があります[1]. タスクの実行可能状態になるまでの時間の最悪値が保証されるように作られています.
OSはタスクごとにメモリを動的に割り当てる必要があります(タスクが保有するメモリに関することはのちに説明します). というのも, これらのタスクはアプリケーション実行中に生成, 削除される可能性があるからです.
今回では, このメモリ管理をOSが行うことにします. OSがメモリ管理を行うことで, OS動作の理解がしやすくなるからです.
このページでは, OSによるメモリ管理をどのように実装するのか説明します.
ここでは, 実際にタスクが作成されたときのメモリの構造を示していきたいと思います. メモリでの各領域の説明, この構造によるmallocの問題を示します.
OSはタスクごとにメモリを動的に割り当てる必要があります(タスクが保有するメモリに関することはのちに説明します). というのも, これらのタスクはアプリケーション実行中に生成, 削除される可能性があるからです.
今回では, このメモリ管理をOSが行うことにします. OSがメモリ管理を行うことで, OS動作の理解がしやすくなるからです.
このページでは, OSによるメモリ管理をどのように実装するのか説明します.
ここでは, 実際にタスクが作成されたときのメモリの構造を示していきたいと思います. メモリでの各領域の説明, この構造によるmallocの問題を示します.
Pipenv仮想パッケージ環境上でROS2ノードを動かす.