Pipenv, 非同期処理, スマートポインタ, Queue, ステレオカメラ, テトリス
その他
Pipenv仮想パッケージ環境上でROS2ノードを動かす.
ステレオカメラは,空間の深度を測定するのに使われます.本稿では,二台のウェブカメラを用いてステレオカメラを実装します.ある程度のロバスト性を確保するため,キャリブレーションも行います.
結果,以下のような深度画像を得ることができた.

Pipenv仮想パッケージ環境上でROS2ノードを動かす.
Pipenv仮想パッケージ環境上でROS2ノードを動かす.
本稿では, コードをハイライトするライブラリSyntaxHighlighterの非同期読み込み方法について説明します.
本稿では, スレッドプールの仕組みを理解して, C++を用いて, スレッドプールを自身で実装できることを目指します. 対応環境は, C++14 からを想定しています.
サイズ固定の待ち行列ライブラリを紹介します.
このQueueは, 以下の特徴を持ちます.
- std::queue が使用できない状況下での待ち行列の使用
- メモリを贅沢に使用しないサイズ固定待ち行列
- 例外処理に対応していない環境下での使用
本稿では, スレッドプールの仕組みを理解して, C++を用いて, スレッドプールを自身で実装できることを目指します. 対応環境は, C++14 からを想定しています.
本稿では, スレッドプールの仕組みを理解して, C++を用いて, スレッドプールを自身で実装できることを目指します. 対応環境は, C++14 からを想定しています.
サイズ固定の待ち行列ライブラリを紹介します.
このQueueは, 以下の特徴を持ちます.
- std::queue が使用できない状況下での待ち行列の使用
- メモリを贅沢に使用しないサイズ固定待ち行列
- 例外処理に対応していない環境下での使用
本来手動でメモリ管理しなければならない動的なオブジェクトを、スコープによって自動でメモリ管理するもの。
本稿では, コードをハイライトするライブラリSyntaxHighlighterの非同期読み込み方法について説明します.
サイズ固定の待ち行列ライブラリを紹介します.
このQueueは, 以下の特徴を持ちます.
- std::queue が使用できない状況下での待ち行列の使用
- メモリを贅沢に使用しないサイズ固定待ち行列
- 例外処理に対応していない環境下での使用
ステレオカメラは,空間の深度を測定するのに使われます.本稿では,二台のウェブカメラを用いてステレオカメラを実装します.ある程度のロバスト性を確保するため,キャリブレーションも行います.
結果,以下のような深度画像を得ることができた.
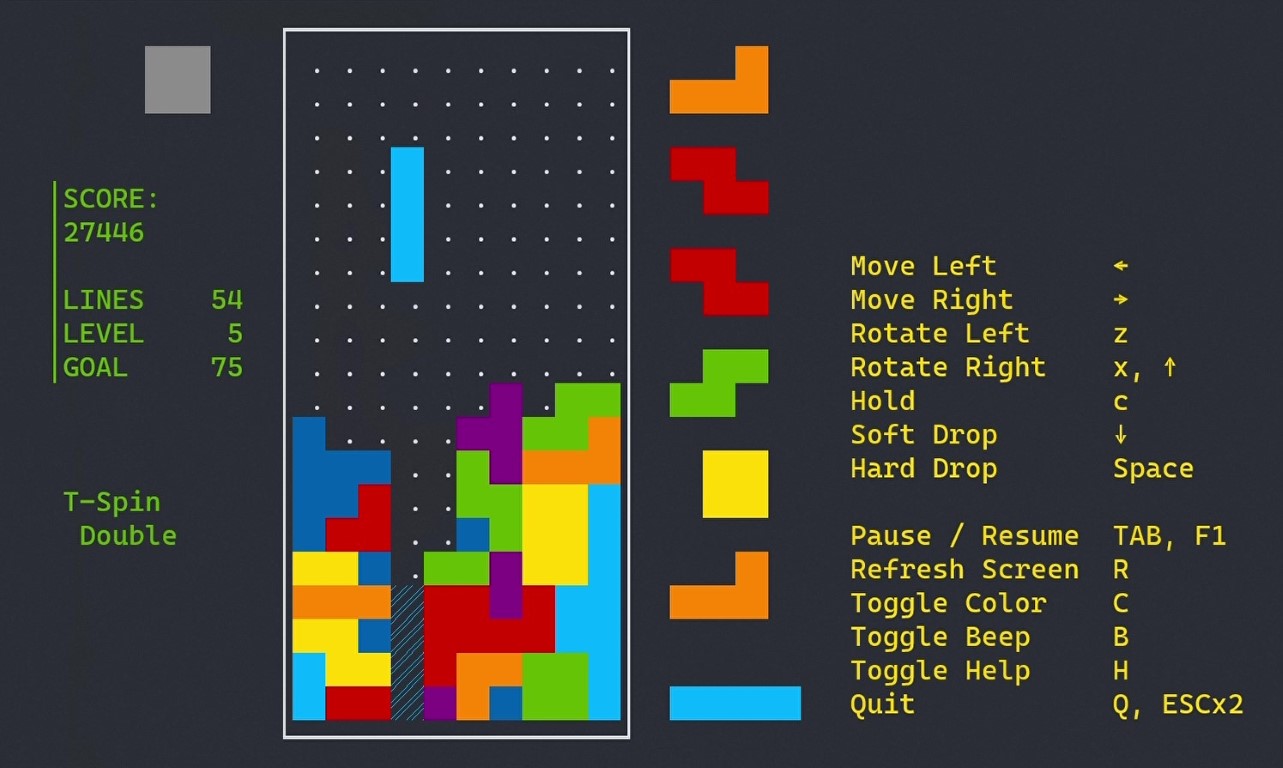
bashでもなく, zshでもなく, cshでもなく, 純粋なshで動く, テトリスの公式ガイドラインにそったテトリスを作りたい.
本来手動でメモリ管理しなければならない動的なオブジェクトを、スコープによって自動でメモリ管理するもの。