コンテンツ管理, 液晶, GPU, ROS
その他
ここでは, グラフィック液晶’SG12864ASLB-GB’の操作方法を説明します. これは, いわゆるライブラリの説明ではなく, ハードウェアそのものに対する操作方法です. この内容から, 自作のライブラリなどを製作することが可能です.
説明項目は以下のとおりです.
- 入手方法
- ピン配置
- 名称
- 実際に使ってみる
- 参考文献
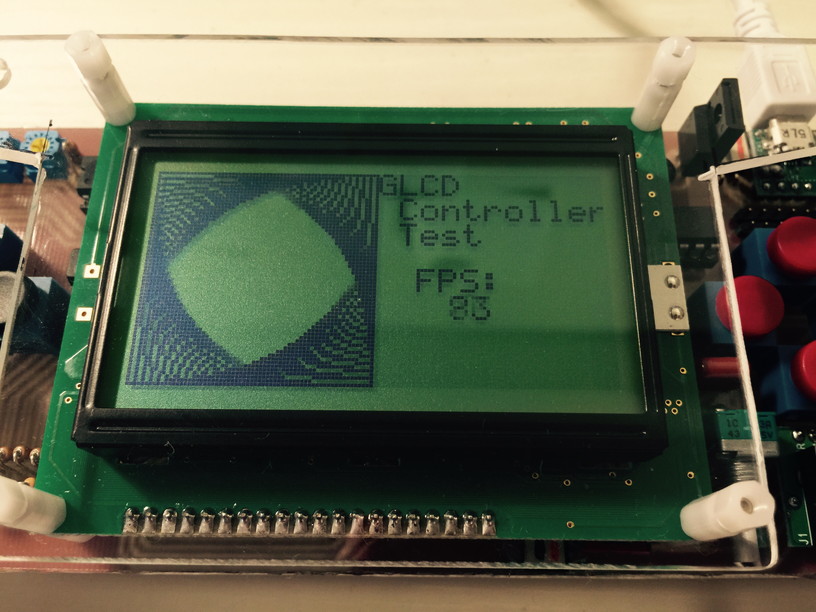
GLCDControllerとは、グラフィック液晶SG12864ASLB-GBを操作するものです. GLCDControllerの特徴は以下の通りです.
- 2Dグラフィック操作ライブラリCanvasの利点を受け継ぎ
- 高いフレームレート
このGLCDControllerのメンバ変数としてCanvasがあるのですが, このCanvasが2Dグラフィック操作を簡単にします. Canvasについての特徴はCanvasの特徴を参照してください.
画面の更新速度ですが,最高60fps以上(最高fps85fps, 平均60fps, 全画面更新15fps)まで出せます(ArduinoUno 16Mhzで検証).
GLCDControllerを改良、強化、何でもしてください(;´∀`)
グラフィック液晶に関する情報をあつかいます. 扱うグラフィック液晶は’SG12864ASLB-GB’です.
RTOSは, 組み込み系のシステムで用いられることが多いです.
一般OSと同様にタスクの切り替えを行う点は同じですが, タスクの切り替え規則に特色があります[1]. タスクの実行可能状態になるまでの時間の最悪値が保証されるように作られています.
公式リファレンスを参考しつつ, Ubuntu 上にNVIDIA GPU ドライバ, CUDA, cuDNNを入れて, tensorflow をGPUで動かす方法を, フローチャートで進めます.
豆知識

ここには,ROS2に関する情報が書かれます.
Pipenv仮想パッケージ環境上でROS2ノードを動かす.
RTOSは, 組み込み系のシステムで用いられることが多いです.
一般OSと同様にタスクの切り替えを行う点は同じですが, タスクの切り替え規則に特色があります[1]. タスクの実行可能状態になるまでの時間の最悪値が保証されるように作られています.
Pipenv仮想パッケージ環境上でROS2ノードを動かす.