製作, アセンブリ, tensorflow, Pipenv, スマートポインタ, 数式, WSL2, 液晶
その他
TerminalPro4用のソフトウェアの作り方を説明します.
- ソフト作製の流れ
- TerminalPro4での制御流れ
- ソフトの作り方
TerminalPro4のハードウェアを作っていきます. 次のことを説明していきます.
- 各モジュールの用意
- モジュール間の接続
ここでは, グラフィック液晶’SG12864ASLB-GB’の操作方法を説明します. これは, いわゆるライブラリの説明ではなく, ハードウェアそのものに対する操作方法です. この内容から, 自作のライブラリなどを製作することが可能です.
説明項目は以下のとおりです.
- 入手方法
- ピン配置
- 名称
- 実際に使ってみる
- 参考文献
私が製作に携わったゲームを紹介します.
コントローラ製作に関することについて説明します. 説明の項目は以下のとおりです.
- 部品入手
- 製作
- 説明
- 参考文献
コントローラ製作に関することについて説明します. 説明の項目は以下のとおりです.
- 部品入手
- 製作
- 説明
- 参考文献
OPアンプ(オペアンプ)を使ったCR型矩形波(方形波)発振回路です. 抵抗の値で発振周波数が変化します. グランドと電源電圧間で発振し, マイコンなどのデジタルICに最適です.
タスクの切り替えをする際, その時のCPUの状態を保存する必要があります. このCPUの状態をコンテキストと呼びます. あるタスクから離れるときはコンテキストの保存を行い, あるタスクに復帰するときはコンテキストの復帰を行います.
ここでは, コンテキストに関する詳しい説明とコンテキストの保存と復帰の方法について説明します.
Pipenv仮想パッケージ環境上でROS2ノードを動かす.
公式リファレンスを参考しつつ, Ubuntu 上にNVIDIA GPU ドライバ, CUDA, cuDNNを入れて, tensorflow をGPUで動かす方法を, フローチャートで進めます.
Pipenv仮想パッケージ環境上でROS2ノードを動かす.
Pipenv仮想パッケージ環境上でROS2ノードを動かす.
2021年12月現在, この記事で紹介している方法は古い可能性があります.
最新の方法について, microsoft 公式の以下のページか, 他の最新情報サイトをご覧ください.
WSL2上でUSBデバイスを認識させるために, VirtualHereを用いた方法を, Linux側でUSB/IPの機能を有効にする方法も含めて, 説明します.

OPアンプ(オペアンプ)を使ったCR型矩形波(方形波)発振回路です. 抵抗の値で発振周波数が変化します. グランドと電源電圧間で発振し, マイコンなどのデジタルICに最適です.
2021年12月現在, この記事で紹介している方法は古い可能性があります.
最新の方法について, microsoft 公式の以下のページか, 他の最新情報サイトをご覧ください.
WSL2上でUSBデバイスを認識させるために, VirtualHereを用いた方法を, Linux側でUSB/IPの機能を有効にする方法も含めて, 説明します.
グラフィック液晶に関する情報をあつかいます. 扱うグラフィック液晶は’SG12864ASLB-GB’です.
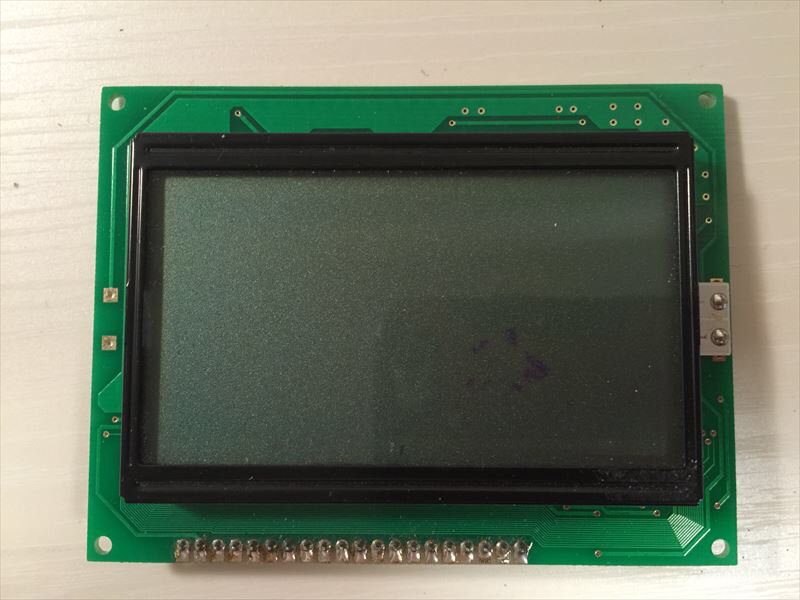
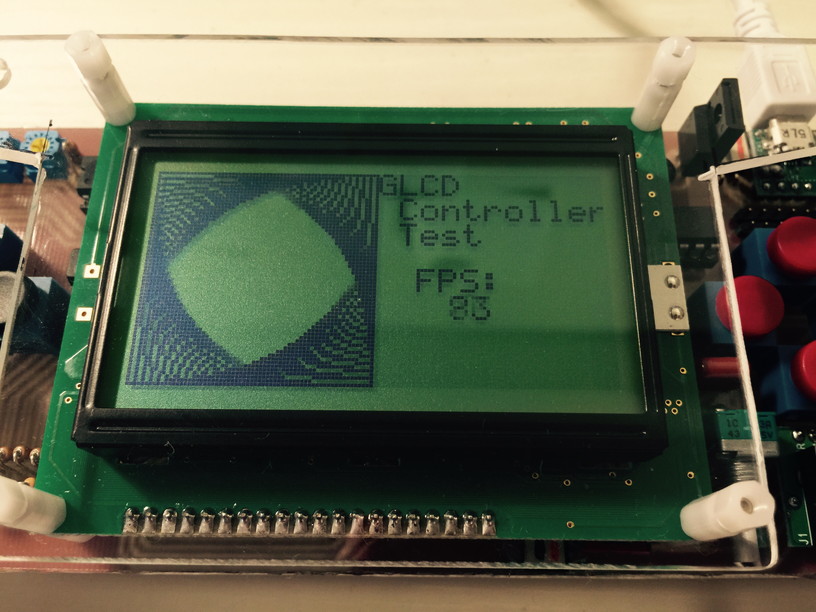
GLCDControllerとは、グラフィック液晶SG12864ASLB-GBを操作するものです. GLCDControllerの特徴は以下の通りです.
- 2Dグラフィック操作ライブラリCanvasの利点を受け継ぎ
- 高いフレームレート
このGLCDControllerのメンバ変数としてCanvasがあるのですが, このCanvasが2Dグラフィック操作を簡単にします. Canvasについての特徴はCanvasの特徴を参照してください.
画面の更新速度ですが,最高60fps以上(最高fps85fps, 平均60fps, 全画面更新15fps)まで出せます(ArduinoUno 16Mhzで検証).
GLCDControllerを改良、強化、何でもしてください(;´∀`)
本来手動でメモリ管理しなければならない動的なオブジェクトを、スコープによって自動でメモリ管理するもの。