製作, プロジェクト, 更新履歴, Pipenv, 数式, テトリス, Steam, リアルタイムOS
その他
TerminalPro4用のソフトウェアの作り方を説明します.
- ソフト作製の流れ
- TerminalPro4での制御流れ
- ソフトの作り方
TerminalPro4のハードウェアを作っていきます. 次のことを説明していきます.
- 各モジュールの用意
- モジュール間の接続
ここにはWebPageViewerの更新履歴が書かれます.
ここにはTwitterBotの更新履歴が書かれます.
私が製作に携わったゲームを紹介します.
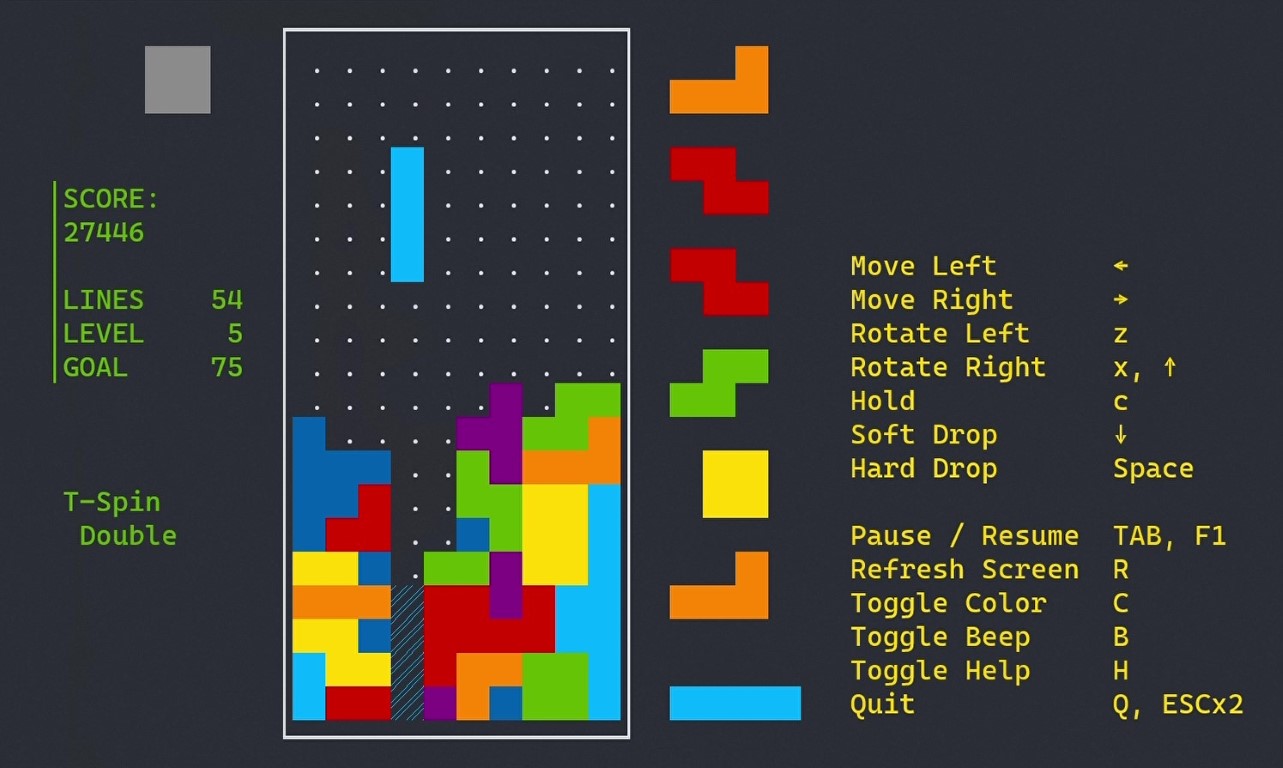
bashでもなく, zshでもなく, cshでもなく, 純粋なshで動く, テトリスの公式ガイドラインにそったテトリスを作りたい.
私が製作に携わったゲームを紹介します.
bashでもなく, zshでもなく, cshでもなく, 純粋なshで動く, テトリスの公式ガイドラインにそったテトリスを作りたい.
コントローラ製作に関することについて説明します. 説明の項目は以下のとおりです.
- 部品入手
- 製作
- 説明
- 参考文献
コントローラ製作に関することについて説明します. 説明の項目は以下のとおりです.
- 部品入手
- 製作
- 説明
- 参考文献
OPアンプ(オペアンプ)を使ったCR型矩形波(方形波)発振回路です. 抵抗の値で発振周波数が変化します. グランドと電源電圧間で発振し, マイコンなどのデジタルICに最適です.

nodecは、ゲームエンジンなどのプラットフォームを新しく作成するためのフレームワークです。
アプリ開発のためのプラットフォームは、これまでたくさんありました。たとえば、GUIアプリケーション作成のプラットフォームにはQt、ゲーム開発のためのプラットフォームにはUnityがあります。ですが、これらのプラットフォームは別々で開発されており、そのうえで動くアプリコードもまた、まったく違った様相をしています。
nodecフレームワークを利用することで、新しいプラットフォームを効率的に構築できます。nodecフレームワークは、異なるプラットフォーム間で共通に使える機能を提供します。また、アプリへのインターフェイスはあらかじめ定義されているので、設計の再利用が可能です。
アプリコードの実装も、nodecフレームワークで効率化することが可能です。プラットフォームの上に、機能を抽象化したレイヤー(modules)があり、アプリ層はこのレイヤーを通してプラットフォームの機能を利用します。プラットフォームが異なっても、アプリでの実装の仕方は同じです。
Pipenv仮想パッケージ環境上でROS2ノードを動かす.
Pipenv仮想パッケージ環境上でROS2ノードを動かす.
OSは日常のあらゆる場所で目にします. パソコンには必ずと言っていいほどOSが走っており, 携帯, ゲーム機などにもOSが走っております. このような普段よく使うOSですが, そのOSの仕組みを分かっていても, 実際どのように作るのかはよく知られておらず気になります.
このページでは, 実際にArduinoで動くOSを作成することで, OSの理解を深めます. 使用するプログラミング言語はC言語です. (作成といいましても, すでに在りますFreeRTOSから必要な機能を抜き出し, Arduinoで動くようにしました.) なお, 今回扱うOSは汎用OSではなくリアルタイムOS(RTOS)と呼ばれるものです. 汎用OSとは, すべてのタスクに等しく優先度が与えられますが, RTOSではタスクごとに優先度を設定できます.
話の進め方ですが, 今回のOS製作では実装に重きを置くため, コードを中心に話を進めていきます. 各コードごとに簡単な説明を行い, その中で特に重要な部分―OSの仕組みに深くかかわる部分―もしくはさらに詳しい説明については別ページで行います. これら別ページ―詳細ページ―は子コンテンツである"仕組み"にまとめられています.
話の流れは次のとおりです.
- RTOSとは
- 目標と使い方
- 準備
- ファイル構成
- スクリプト
- ボードの設定
- 仕組み
対応状況
- Arduino UNO
- Arduino Mega
動作確認済み環境
- Arduino IDE 1.8.10
- Arduino AVR Boards 1.8.1
OPアンプ(オペアンプ)を使ったCR型矩形波(方形波)発振回路です. 抵抗の値で発振周波数が変化します. グランドと電源電圧間で発振し, マイコンなどのデジタルICに最適です.
OSは日常のあらゆる場所で目にします. パソコンには必ずと言っていいほどOSが走っており, 携帯, ゲーム機などにもOSが走っております. このような普段よく使うOSですが, そのOSの仕組みを分かっていても, 実際どのように作るのかはよく知られておらず気になります.
このページでは, 実際にArduinoで動くOSを作成することで, OSの理解を深めます. 使用するプログラミング言語はC言語です. (作成といいましても, すでに在りますFreeRTOSから必要な機能を抜き出し, Arduinoで動くようにしました.) なお, 今回扱うOSは汎用OSではなくリアルタイムOS(RTOS)と呼ばれるものです. 汎用OSとは, すべてのタスクに等しく優先度が与えられますが, RTOSではタスクごとに優先度を設定できます.
話の進め方ですが, 今回のOS製作では実装に重きを置くため, コードを中心に話を進めていきます. 各コードごとに簡単な説明を行い, その中で特に重要な部分―OSの仕組みに深くかかわる部分―もしくはさらに詳しい説明については別ページで行います. これら別ページ―詳細ページ―は子コンテンツである"仕組み"にまとめられています.
話の流れは次のとおりです.
- RTOSとは
- 目標と使い方
- 準備
- ファイル構成
- スクリプト
- ボードの設定
- 仕組み
対応状況
- Arduino UNO
- Arduino Mega
動作確認済み環境
- Arduino IDE 1.8.10
- Arduino AVR Boards 1.8.1